Привет Бро! Спорим ты думал об установки GPS на свой Novice 3. Тебе же интересно как далеко и высоко он может летать, да и с какой скоростью. По этому давай установим и настроем GPS модуль на наш Eachine Novice 3.
Какой GPS выбрать?
Тут на самом деле выбор огромный, так как GPS модулей полно. Но мы будем использовать самый популярный и как многое говорят самый лучший GPS модуль для квадов, а именно Beitian BN – 180.

Как подключить GPS модуль
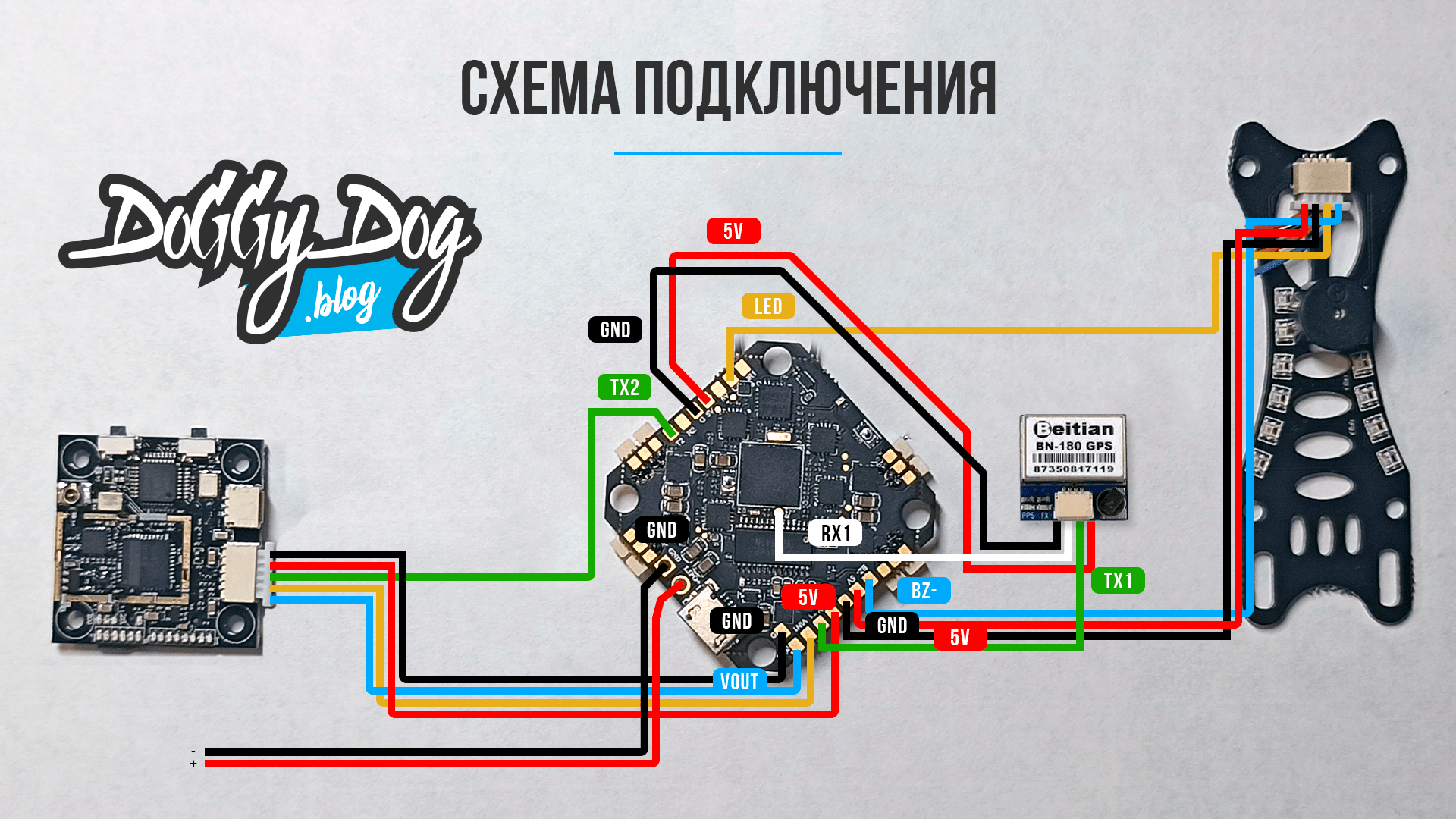
Подключение очень простое, тебе надо припаять провода от модуля к свободному UART – порту. На полетном контроллере AIO F4 Flight Controller свободный UART1, к нему и будем подключать. Подключение крестовое, то есть TX с GPS модуля надо подключить к RX полетного контроллера. Соответственно RX с GPS модуля к TX полетного контроллера. В общем смотри на схему подключения.
Как установить GPS модуль
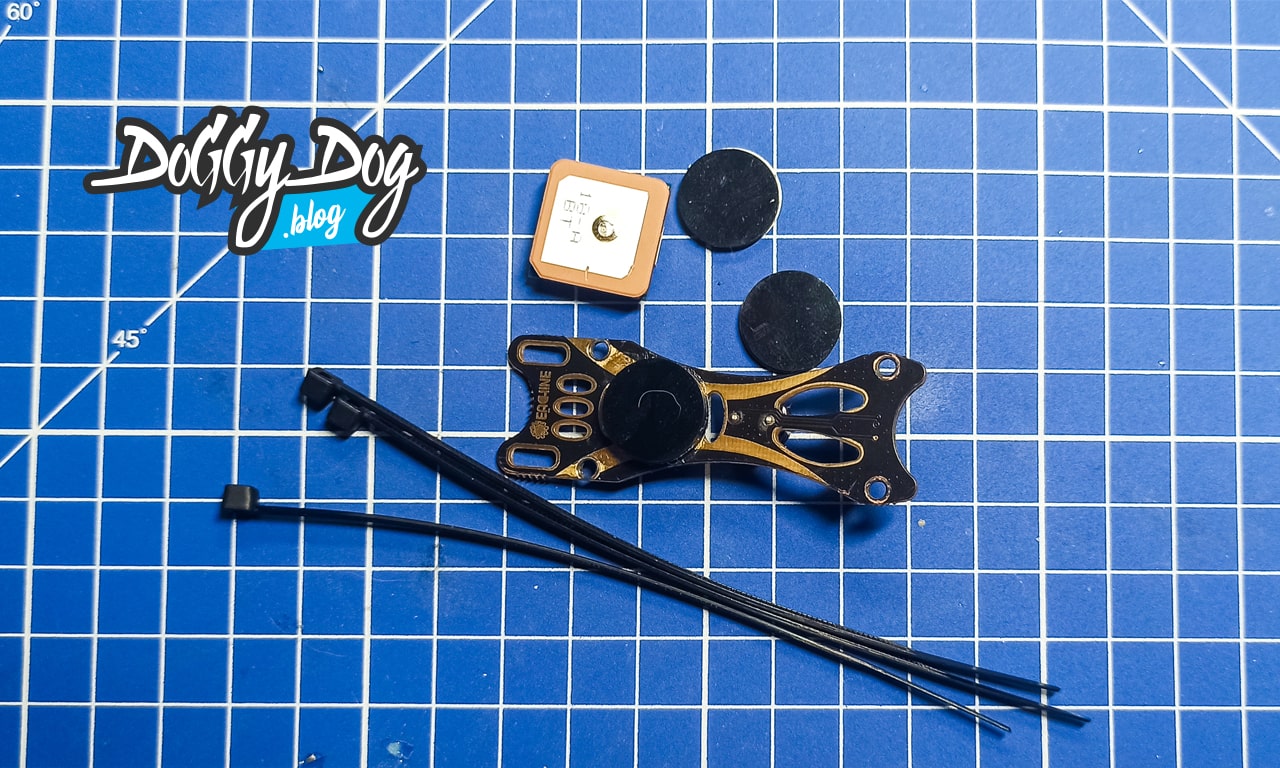
Я установил модуль на двухсторонний скотч идущий в комплекте и затянул его тремя стяжками для прочности. Рекомендую установить спереди, так как антенна видео передатчика может давать помехи на модуль, это не точно, но у нас есть возможность закрепить модуль спереди подальше от антенны.
Настройка GPS модуля в Betaflight
-
 Подключаем квад к компьютеру, открываем Betaflight и переходим на вкладку «Порты». Нам нужна строка UART1, в колонке «Вход датчиков» выбираем GPS и 57600. После нажимаем на кнопку «Сохранить и перезагрузить».
Подключаем квад к компьютеру, открываем Betaflight и переходим на вкладку «Порты». Нам нужна строка UART1, в колонке «Вход датчиков» выбираем GPS и 57600. После нажимаем на кнопку «Сохранить и перезагрузить».
-
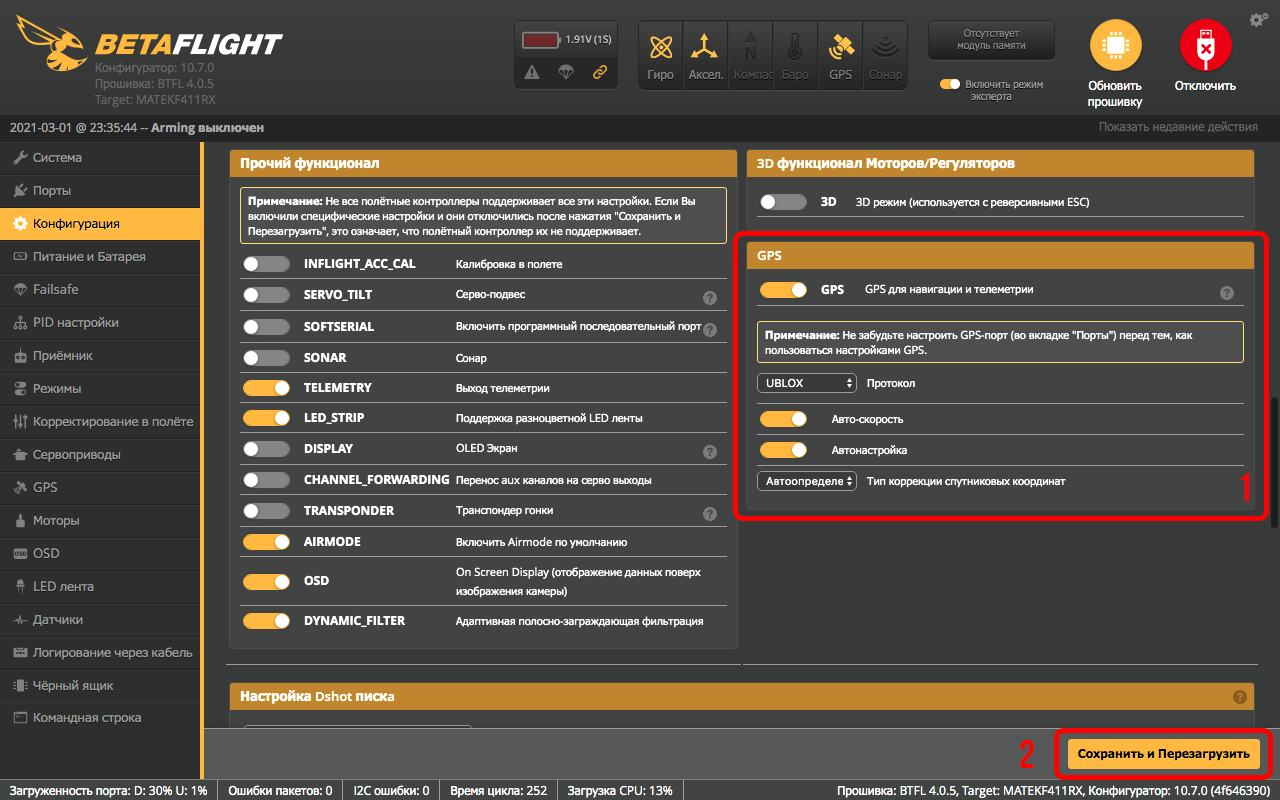 Снова подключаемся к Betaflight и переходим на вкладку «Конфигурация», листаем вниз до поля GPS и активируем его. Далее устанавливаем настройки как на фото и жмем кнопку «Сохранить и перезагрузить».
Снова подключаемся к Betaflight и переходим на вкладку «Конфигурация», листаем вниз до поля GPS и активируем его. Далее устанавливаем настройки как на фото и жмем кнопку «Сохранить и перезагрузить».
-
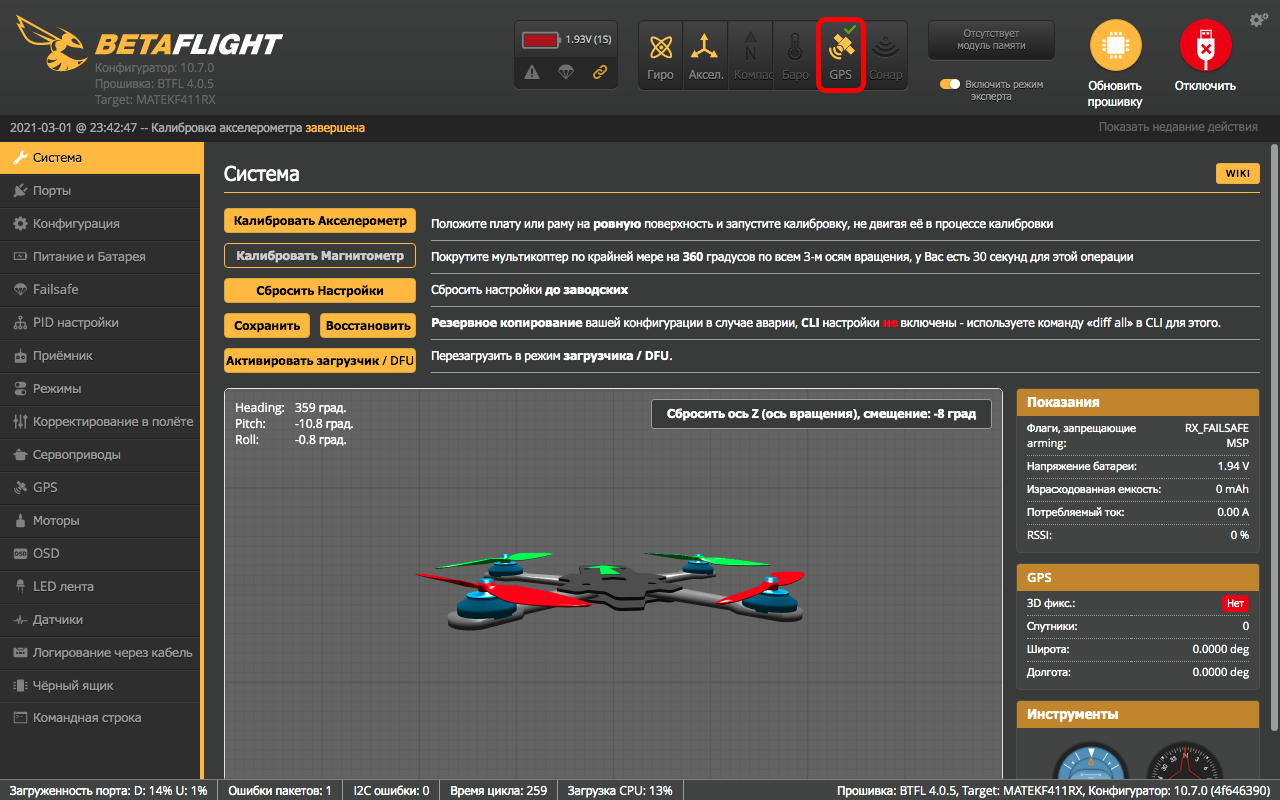 Подключаемся к Betaflight и если все сделано правильно ты увидишь что иконка GPS стала активна. Если она не активна ты неправильно подключил провода, либо выбрал не тот протокол на вкладке «Конфигурация».
Подключаемся к Betaflight и если все сделано правильно ты увидишь что иконка GPS стала активна. Если она не активна ты неправильно подключил провода, либо выбрал не тот протокол на вкладке «Конфигурация».
-
 Теперь переходим на вкладку «Failsafe» и активируем режим «GPS спасение». Параметр можешь не менять, или выставить как на фото. После нажимаем на кнопку «Сохранить и перезагрузить».
Теперь переходим на вкладку «Failsafe» и активируем режим «GPS спасение». Параметр можешь не менять, или выставить как на фото. После нажимаем на кнопку «Сохранить и перезагрузить».
GPS Rescue
Это возврат домой, да Betaflight умеет возвращать квад домой. Правда с некоторыми оговорками. Дело в том что Betaflight создана для гонок, фристайл и синематик полетов и навигация в ней посредственна. По этому возврат домой я бы назвал возвратом в предполагаемую точку старта. GPS Rescue – нужен в тех случаях когда ты словил Failsafe или у тебя пропал видео сигнал, в этих случаях ты можешь щелкнуть переключатель на аппаратуре управления и квад полетит в сторону дома. Поэтому полностью рассчитывать на данный режим не стоит, ты должен всегда смотреть в свой шлем или очки и ждать когда появиться сигнал. И как только он появиться перехватить управление на себя, щелкнув переключатель обратно. В противном случаи квад долетит до предполагаемой точки взлета, начнет снижение и выключит моторы на заданной высоте. Вот только высота по GPS может в корне отличаться с реальной высотой и есть шанс что квад просто рухнет на землю. Используй этот режим только до восстановления связи с квадом или видеосигналом.
Как настроить GPS Rescue на твоей аппаратуре
-
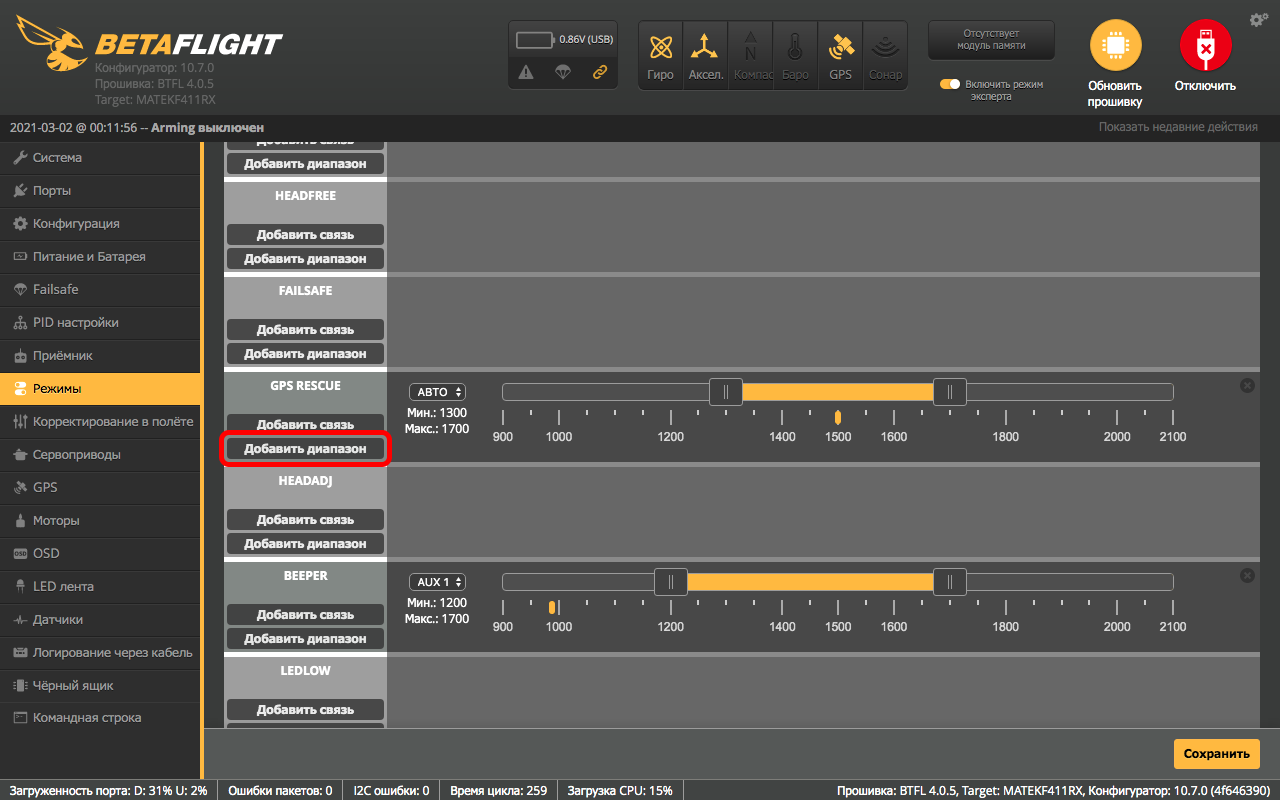 Открываем Betaflight и переходим на вкладку «Режимы». Спускаемся вниз до строки «GPS RESCUE» и активируем ее нажатием на кнопку «Добавить диапазон».
Открываем Betaflight и переходим на вкладку «Режимы». Спускаемся вниз до строки «GPS RESCUE» и активируем ее нажатием на кнопку «Добавить диапазон».
-
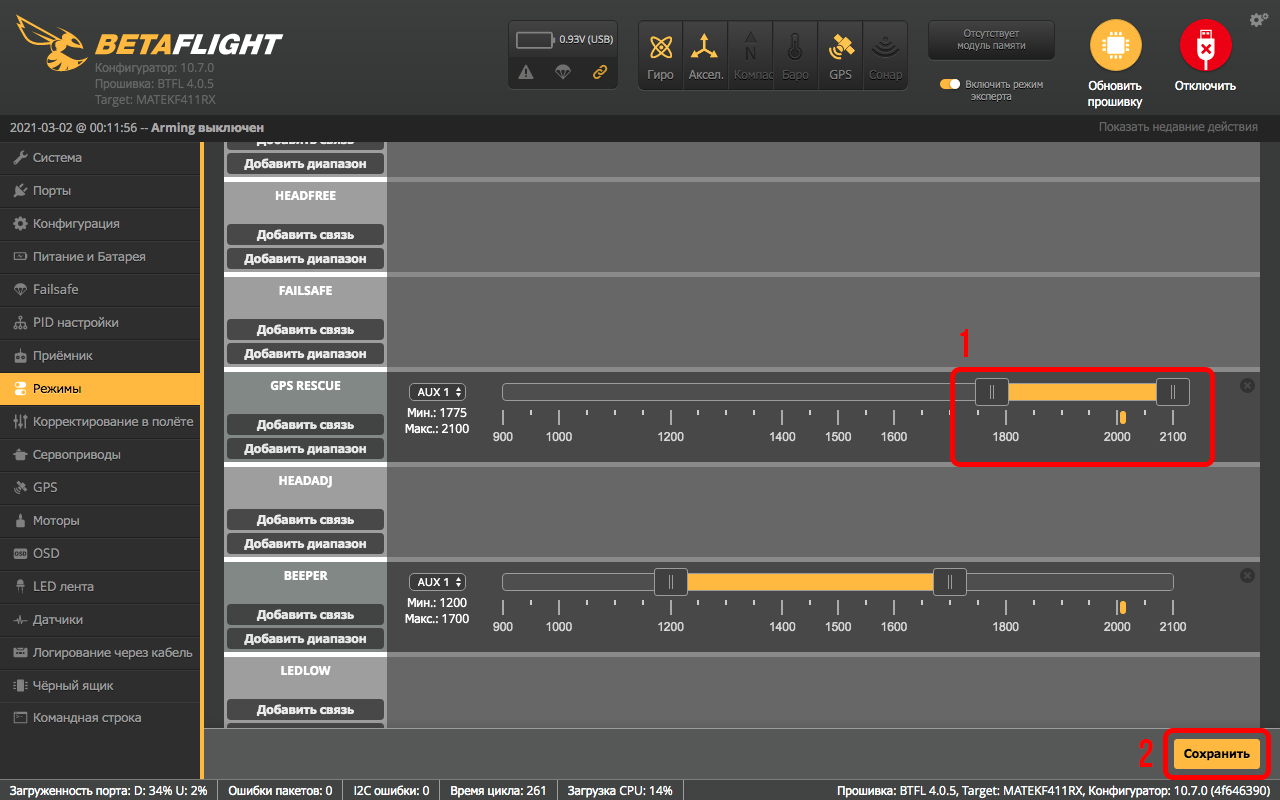 Далее на аппаратуре управления щелкаем тот переключатель на котором хотим сделать возврат домой и устанавливаем ползунок так, чтобы он попадал в указанный диапазон и жмем кнопку «Сохранить».
Далее на аппаратуре управления щелкаем тот переключатель на котором хотим сделать возврат домой и устанавливаем ползунок так, чтобы он попадал в указанный диапазон и жмем кнопку «Сохранить».
Всегда проверяй GPS Rescue перед тем как полететь на дальняк. Делается это просто: отлети от себя на 200 – 250 метров и щелкни переключатель в режим GPS Rescue, посмотри как поведет себя квад. Если он развернулся и полетел в сторону дома, то все ок. Лучше всего проделать это несколько раз и убедиться что все работает как надо. Так же чтобы не потерять квад в чистом поле сделай себе несколько OSD профилей. К примеру у меня на третьем профиле OSD есть информация с GPS координатами и если квад упал в поле, я вбиваю координаты в телефон и иду его искать. Возьми за правило записывать каждый полет на DVR своего шлема или очков, так как данные телеметрии о GPS не выводиться на аппаратуру управления. И вообще Eachine Novice 3 не создан для дальних и высоких полетов, если решил улететь далеко и высоко будь готов расстаться с квадом.
Ошибка GPS Rescue
У возврата домой есть обязательное условие, GPS модуль должен найти минимальное количество спутников чтобы режим GPS Rescue работал. Если спутников не будет или их будет меньше чем минимальное значение (у меня это 5 спутников), то квад не взлетит. Конечно ее можно обойти вбив всего одну команду в CLI. Но, давай договоримся, ты это делаешь на свой страх и риск, если квад улетит в Китай виноват ты сам.
Итак, перейти в командную строку Betaflight и введи следующею команду:
set gps_rescue_allow_arming_without_fix = ON
saveИ нажми «Enter», после этого квад будет взлетать даже без спутников. Если ты не уверен, то верни все как было, для этого введи эту команду:
set gps_rescue_allow_arming_without_fix = OFF
saveOSD профили
Ну и в заключение покажу как настроить несколько профилей OSD и как переключаться между ними в полете. У меня три профиля: первый с минимумом информации, он нужен для гонок и фристайла. Второй с минимальным набором GPS параметров: высота, дистанция, скорость. А третий профиль по максимуму забит параметрами, но самое главное что в этом профиле есть GPS координаты на случай если все же квад упадет где – то далеко. И если я лечу на Novice 3 далеко я использую именно этот профиль. Думаю с настройкой OSD ты справишься, в ней нет ничего сложного. Переключение профиля при настройке выполняются при помощи выпадающего списка. А элементы по профилю выставляют слева.

После того как ты настроил все профили и сохранил их, надо научить аппу переключаться между ними в полете:
-
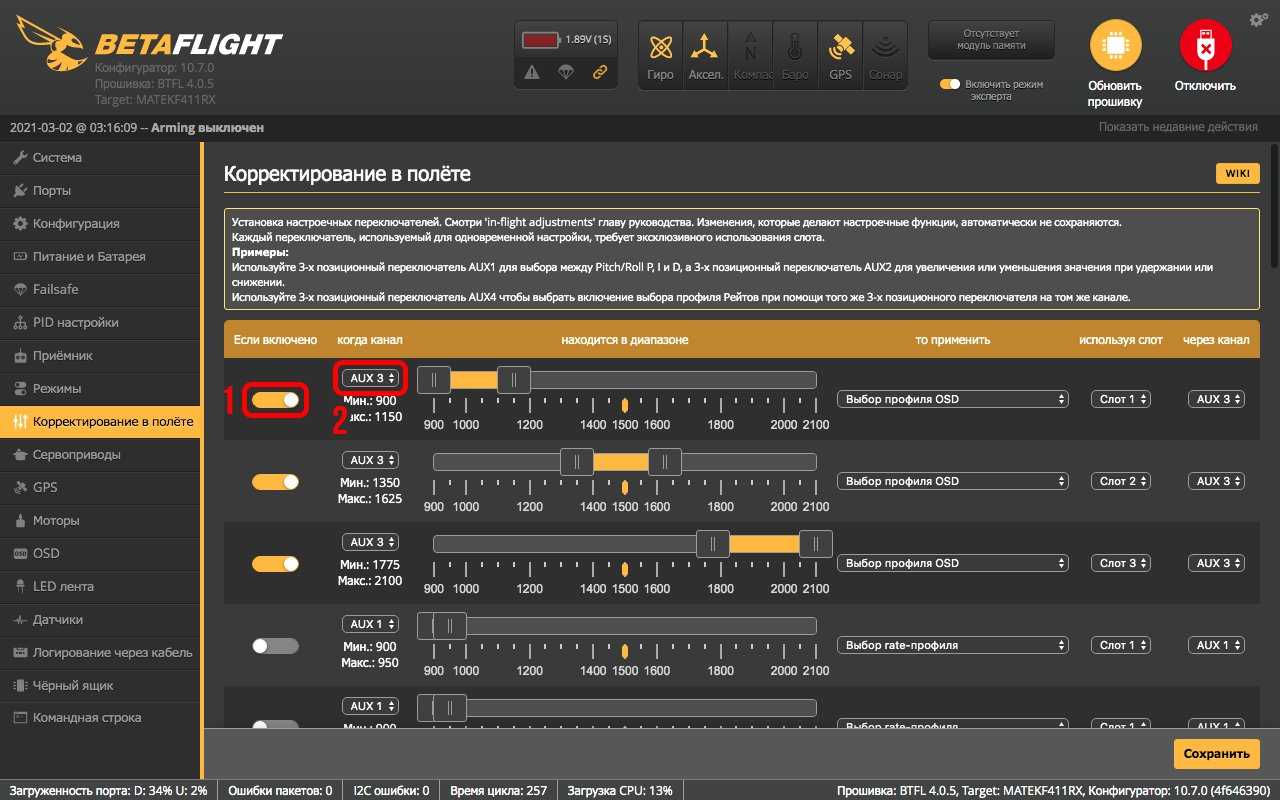 Открываем Betaflight и переходим во вкладку «Корректирование в полете». Далее активируем первый переключатель, а в столбе «Когда канал» ставим тот AUX на котором хотим повесить профиль OSD. У меня это AUX 3.
Открываем Betaflight и переходим во вкладку «Корректирование в полете». Далее активируем первый переключатель, а в столбе «Когда канал» ставим тот AUX на котором хотим повесить профиль OSD. У меня это AUX 3.
-
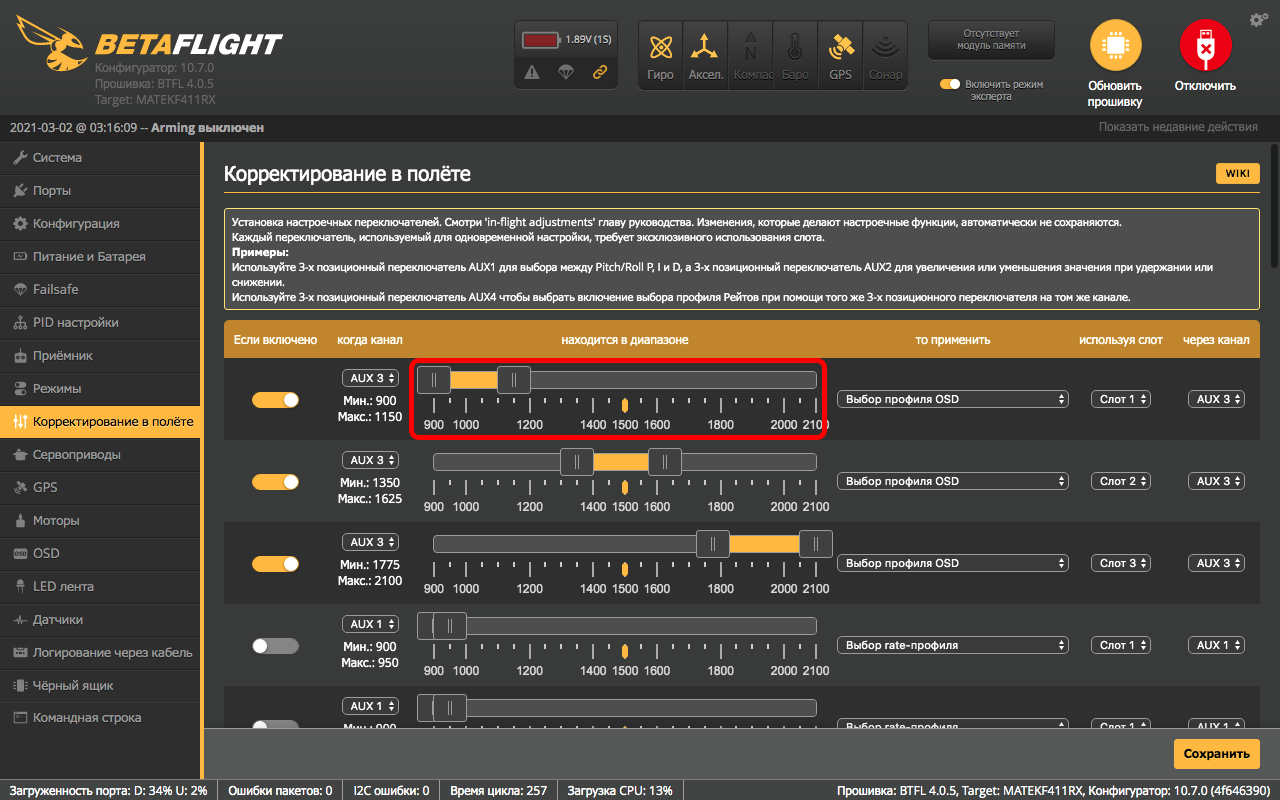 В столбце «Находиться в диапазоне» выставляем диапазон срабатывания, так же как при установке режимов.
В столбце «Находиться в диапазоне» выставляем диапазон срабатывания, так же как при установке режимов.
-
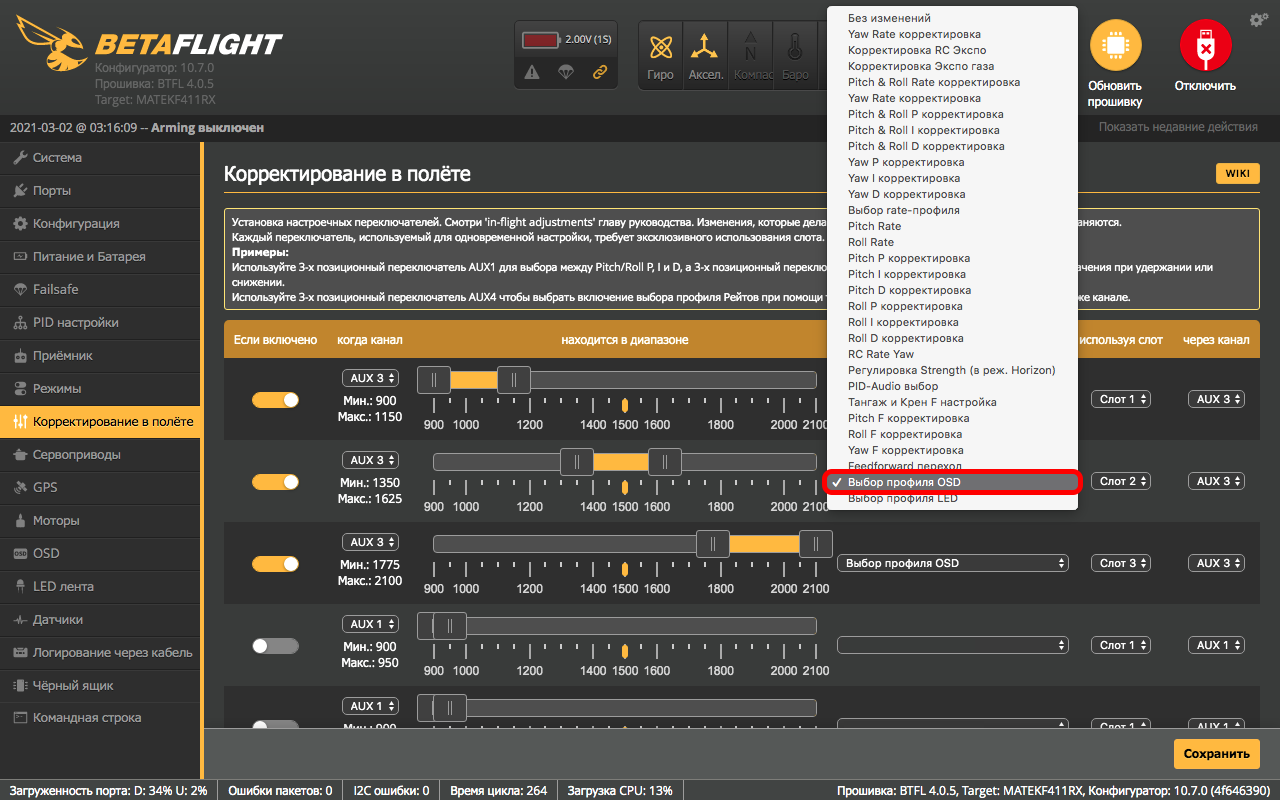 Далее в столбе «То применить» в выпадающем списке выбираем «Выбор профиля OSD».
Далее в столбе «То применить» в выпадающем списке выбираем «Выбор профиля OSD».
-
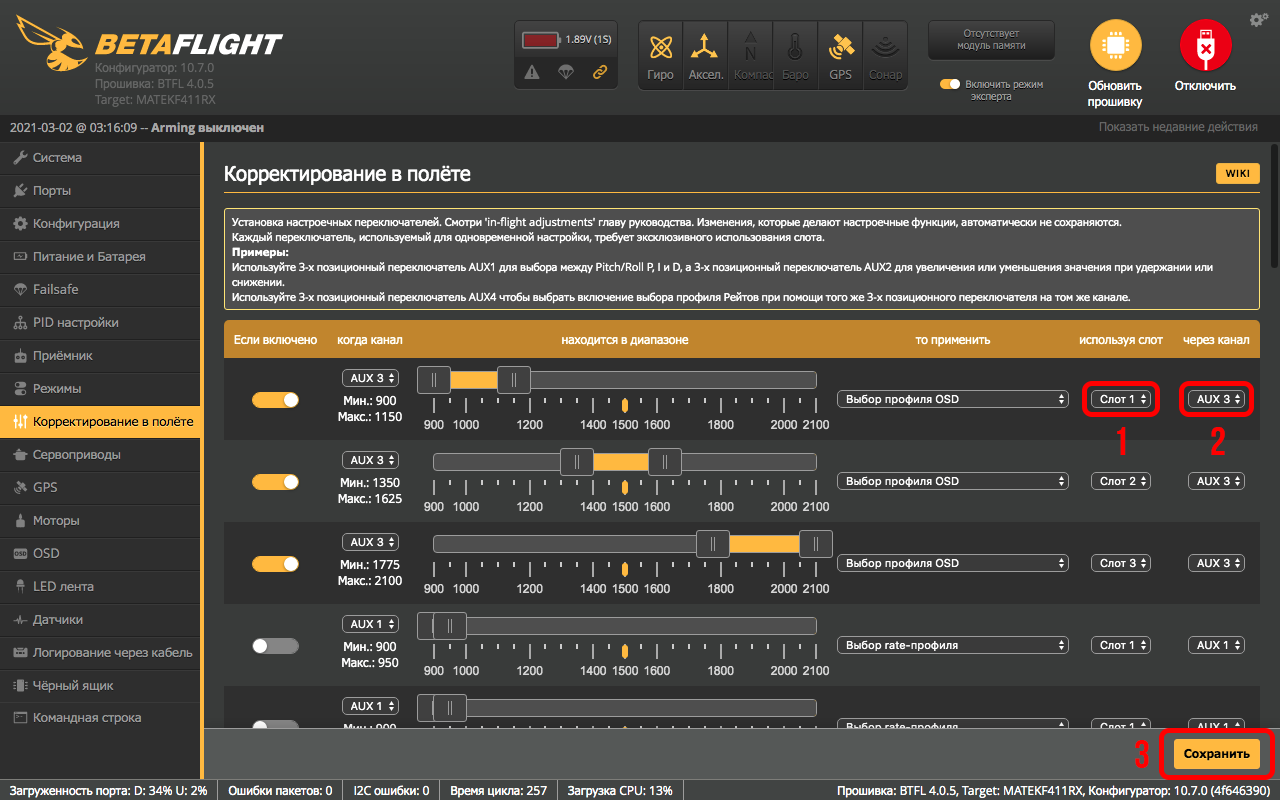 В столбце «Используя слот» выбираем «Слот 1». Соответственно для второго и третьего OSD профиля «Слот 2» и «Слот 3». А в столбце «Через канал» снова указываем наш AUX, у меня это AUX 3. Повтори эти же действия для OSD профиля 2 и 3, и после нажми на кнопку «Сохранить».
В столбце «Используя слот» выбираем «Слот 1». Соответственно для второго и третьего OSD профиля «Слот 2» и «Слот 3». А в столбце «Через канал» снова указываем наш AUX, у меня это AUX 3. Повтори эти же действия для OSD профиля 2 и 3, и после нажми на кнопку «Сохранить».
На этом все, GPS модуль установлен и настроен можно идти летать. Но еще раз позволь напомнить что Eachine Novice 3 – это гоночный дрон и он не рассчитан на долгие и дальние полеты, будь осторожен. Чистого неба, увидимся!



 Новые посты в моем Телеграмм канале
Новые посты в моем Телеграмм канале