Привет Бро! Показываю, как настроить Hee Wing T1 на iNav.
Прошивка
Лучше делать пока полетник не в самолете, так проще калибровать гиру. Но если уже поставил, то крути самолет или залей мой «diff». Он, как всегда, в конце поста.
-
 Подключаемся и нажимаем на вкладку «Firmware Flasher»;
Подключаемся и нажимаем на вкладку «Firmware Flasher»;
-
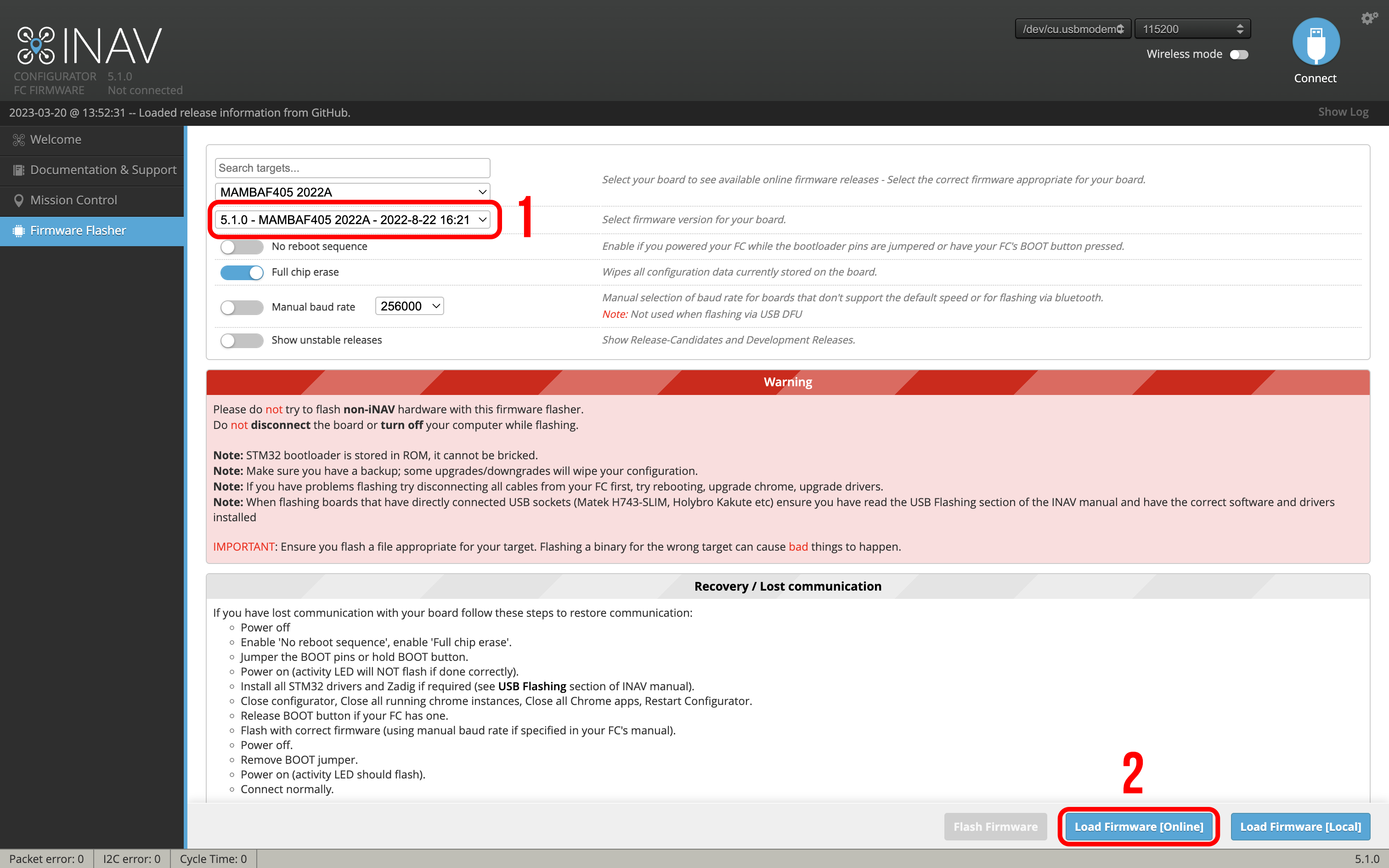 Выбираем наш полетник из списка и версию прошивки. Не забываем про «Full chip erase» и жмем кнопку «Load Firmware [Online]». На самолете другой полетник и версия 6.0.0, тут Mamba только чтобы показать, как прошить;
Выбираем наш полетник из списка и версию прошивки. Не забываем про «Full chip erase» и жмем кнопку «Load Firmware [Online]». На самолете другой полетник и версия 6.0.0, тут Mamba только чтобы показать, как прошить;
-
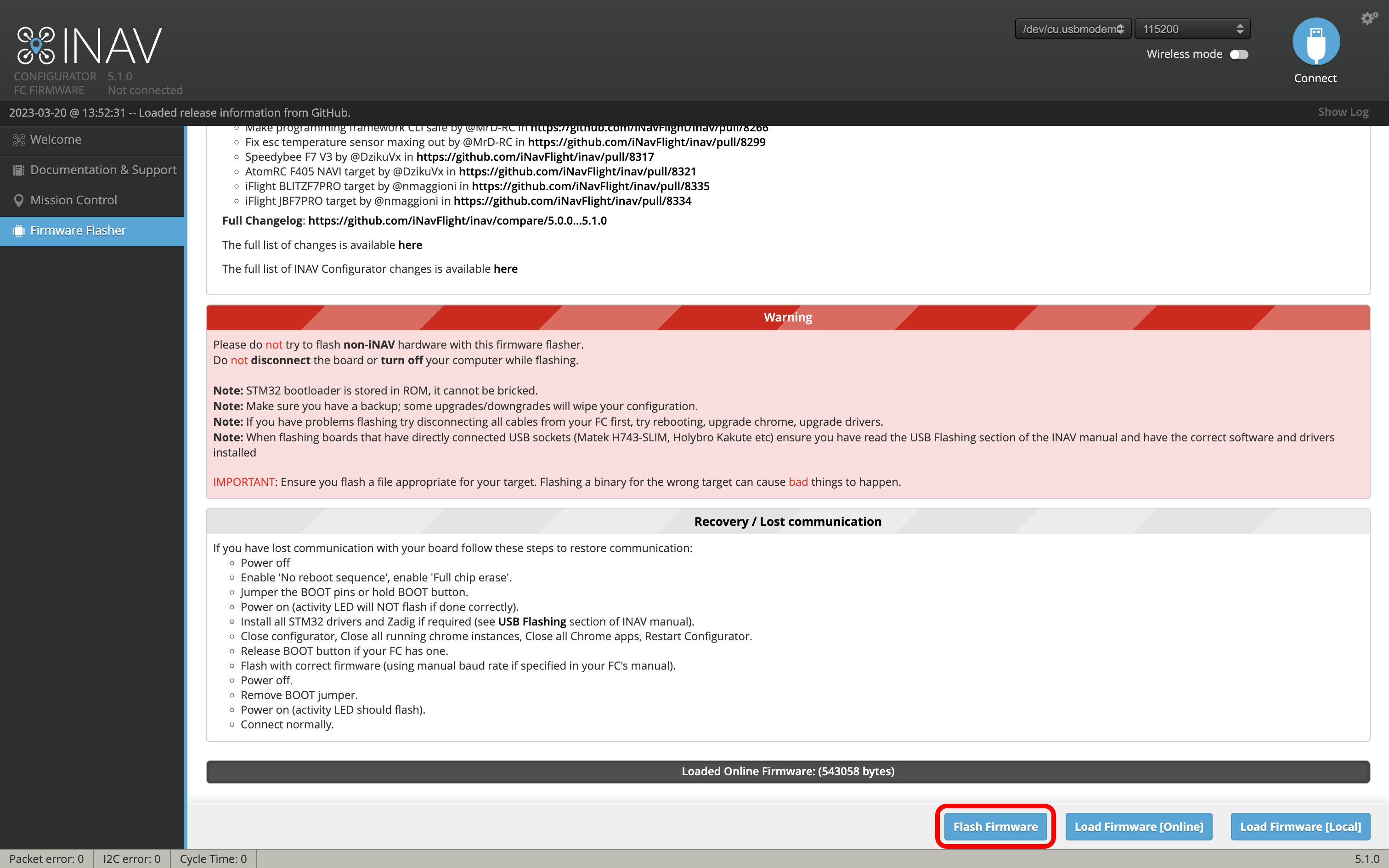 Прошивка загрузиться, и кнопка «Flash Firmware» станет активной. Жмем на нее для прошивки. Полетник сам перейдет в «DFU» режим и начнется прошивка;
Прошивка загрузиться, и кнопка «Flash Firmware» станет активной. Жмем на нее для прошивки. Полетник сам перейдет в «DFU» режим и начнется прошивка;
-
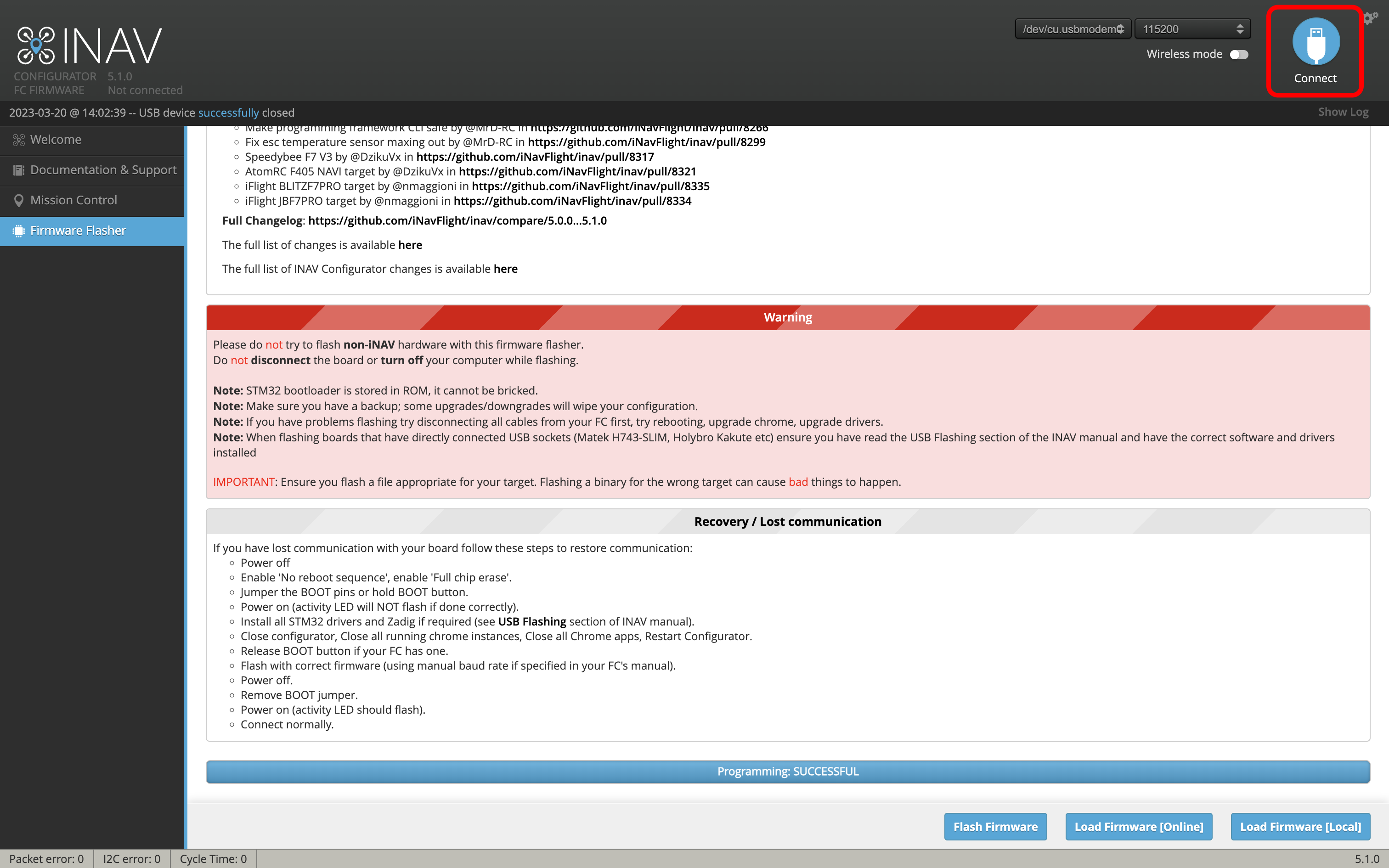 После успешного окончания прошивки жмем на кнопку «Connect»;
После успешного окончания прошивки жмем на кнопку «Connect»;
-
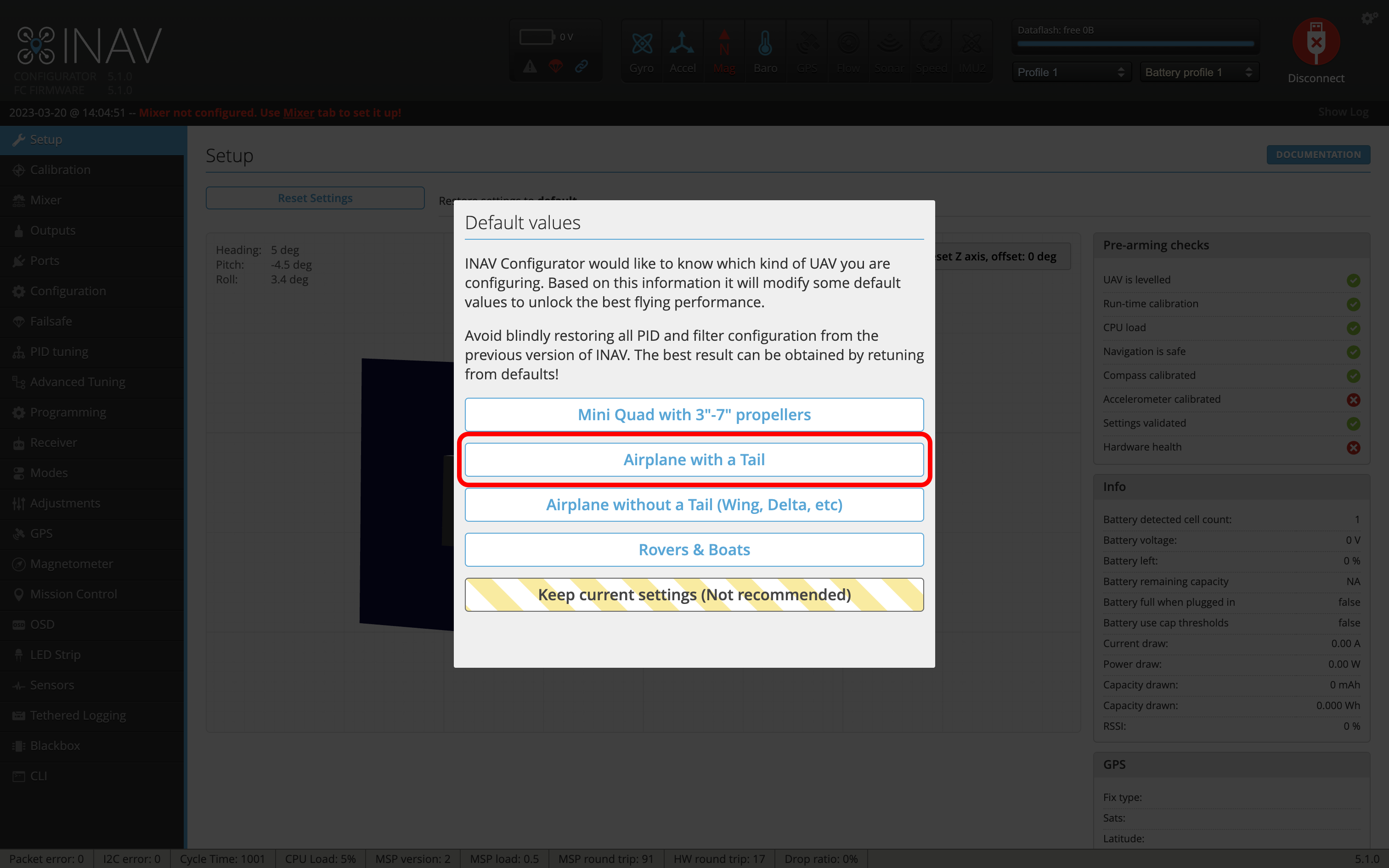 Появится окно с предустановками. Выбираем «Airplane with a Tail»;
Появится окно с предустановками. Выбираем «Airplane with a Tail»;
-
 Полетник перезагрузиться и мы увидим самолет.
Полетник перезагрузиться и мы увидим самолет.
Calibration
Жмем на кнопку «Calibrate Accelerometer» и выполняем действия, которые говорит нам iNav. После завершения калибровки проверь значения.

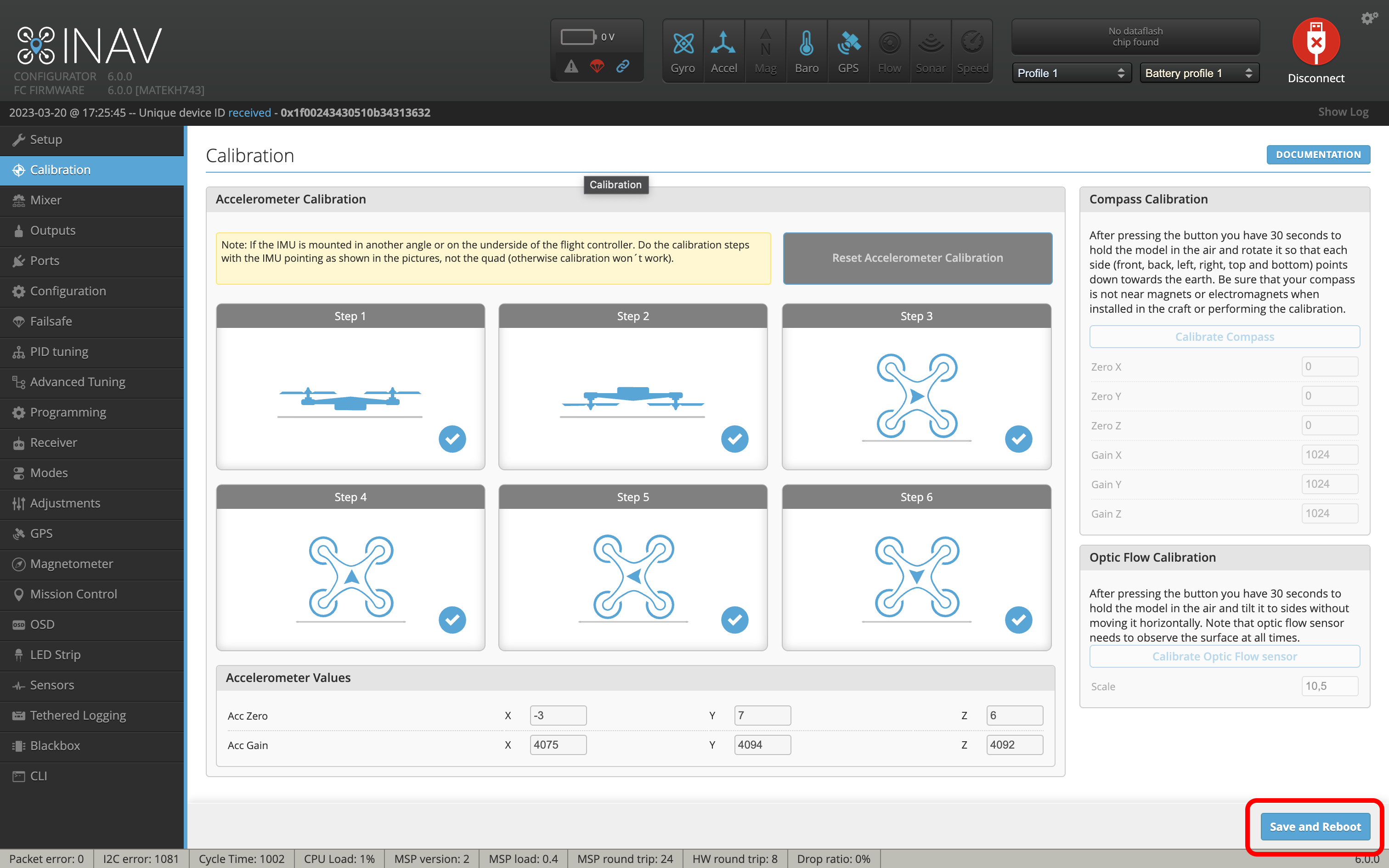
Если после калибровки в каком-то из значений стоит 4096, значит во время калибровки произошёл сбой и надо снова сделать калибровку.
Mixer
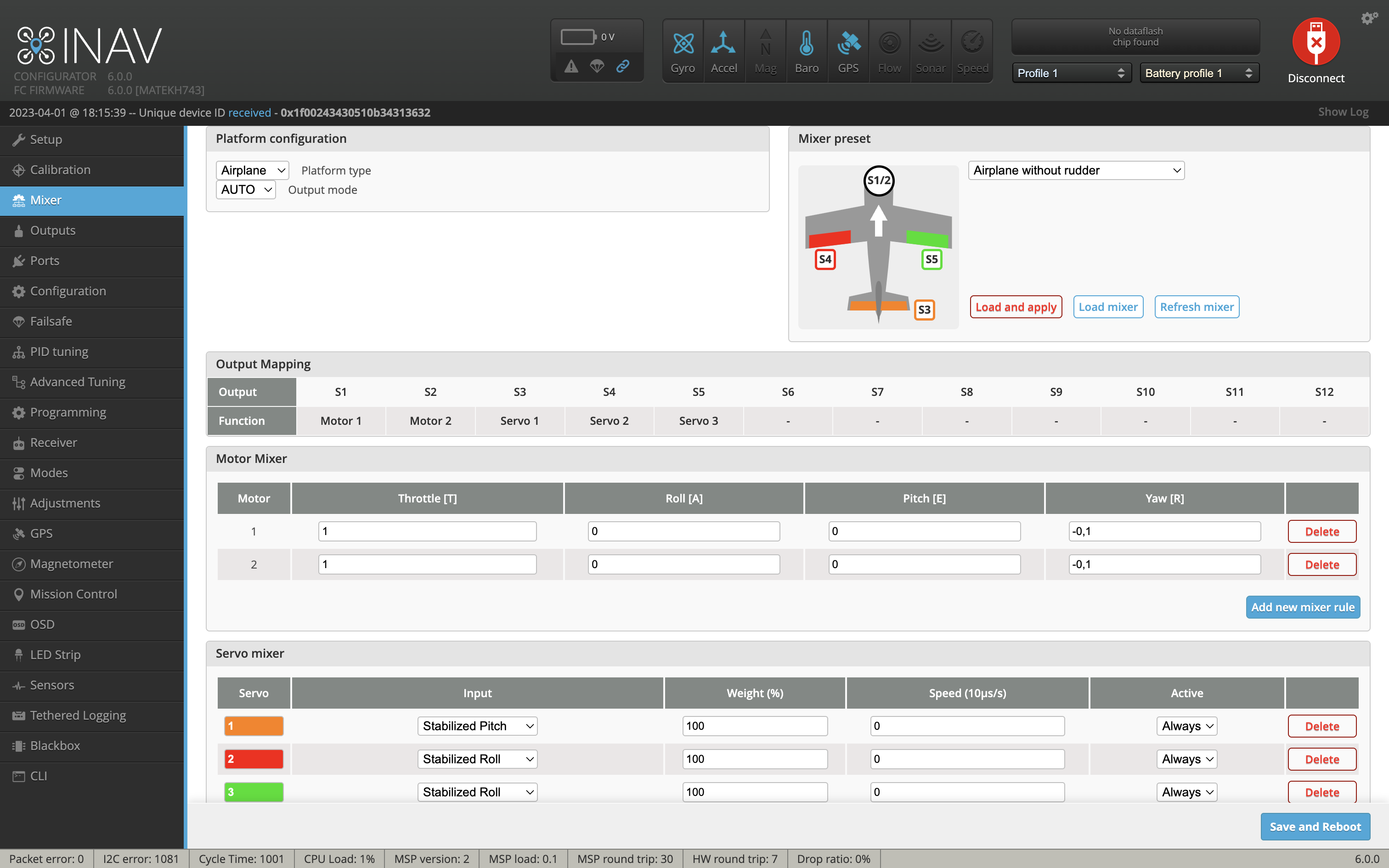
- Platform configuration – выбираем «Airplan»;
- Mixer preset – выбираем «Airplane without rudder». Так как у нас всего три сервопривода.
- Output Mapping и Motor Mixer оставляем как есть;
- Servo mixer – тут проверяем выходы по цветам. Ничего сложного нет. Смотрим на «Output Mapping» и понимаем, что первые два — это моторы, остальные три это сервы. Первая серва – это «Pitch», он же руль высоты и так далее;
- Сохраняем настройки.
Outputs
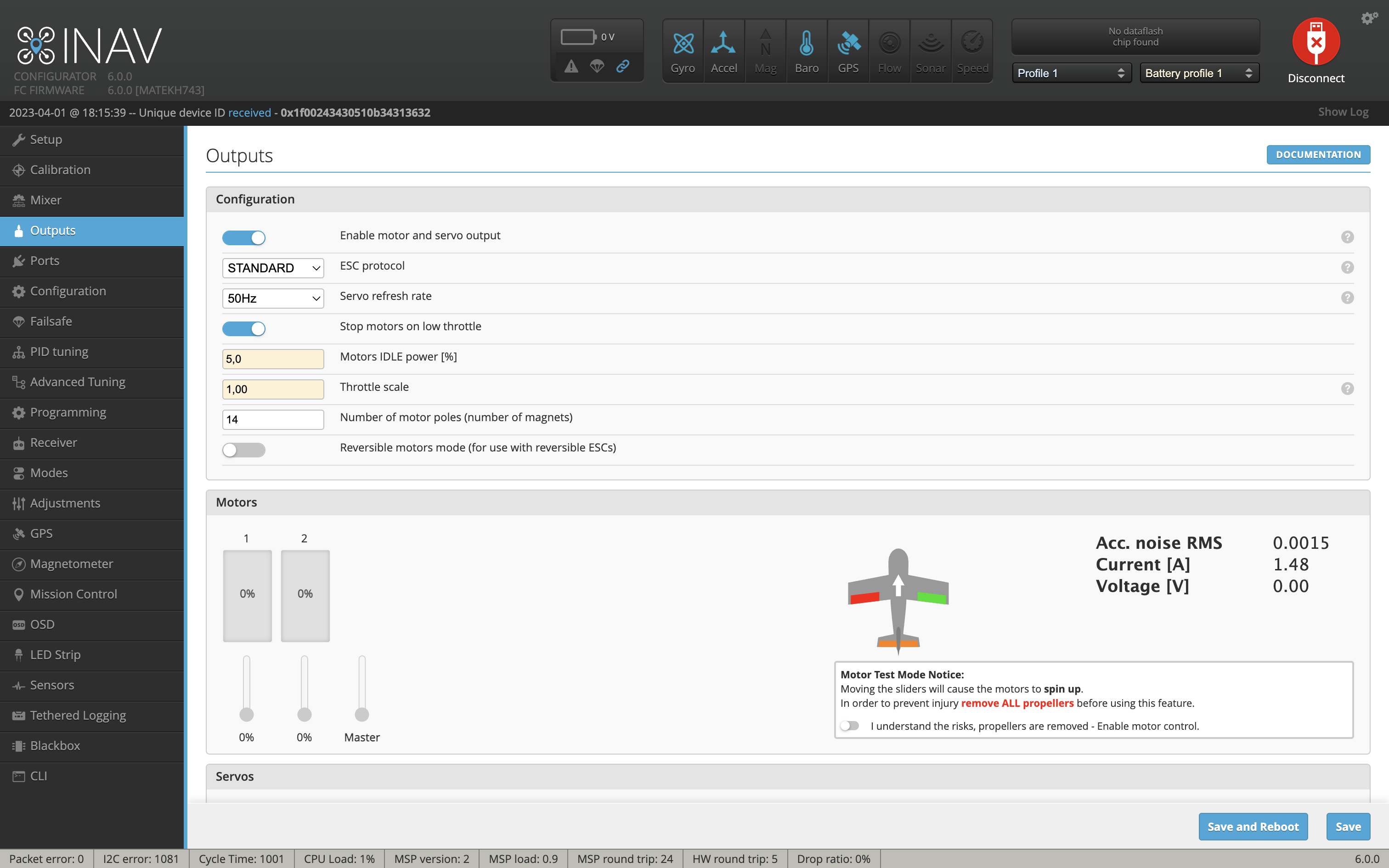

- Configuration выставляем как на скрине;
- Servos активируем переключатель «Reverse».
На фото ниже показано правильное направление серв при сдвиге стика.




Ports
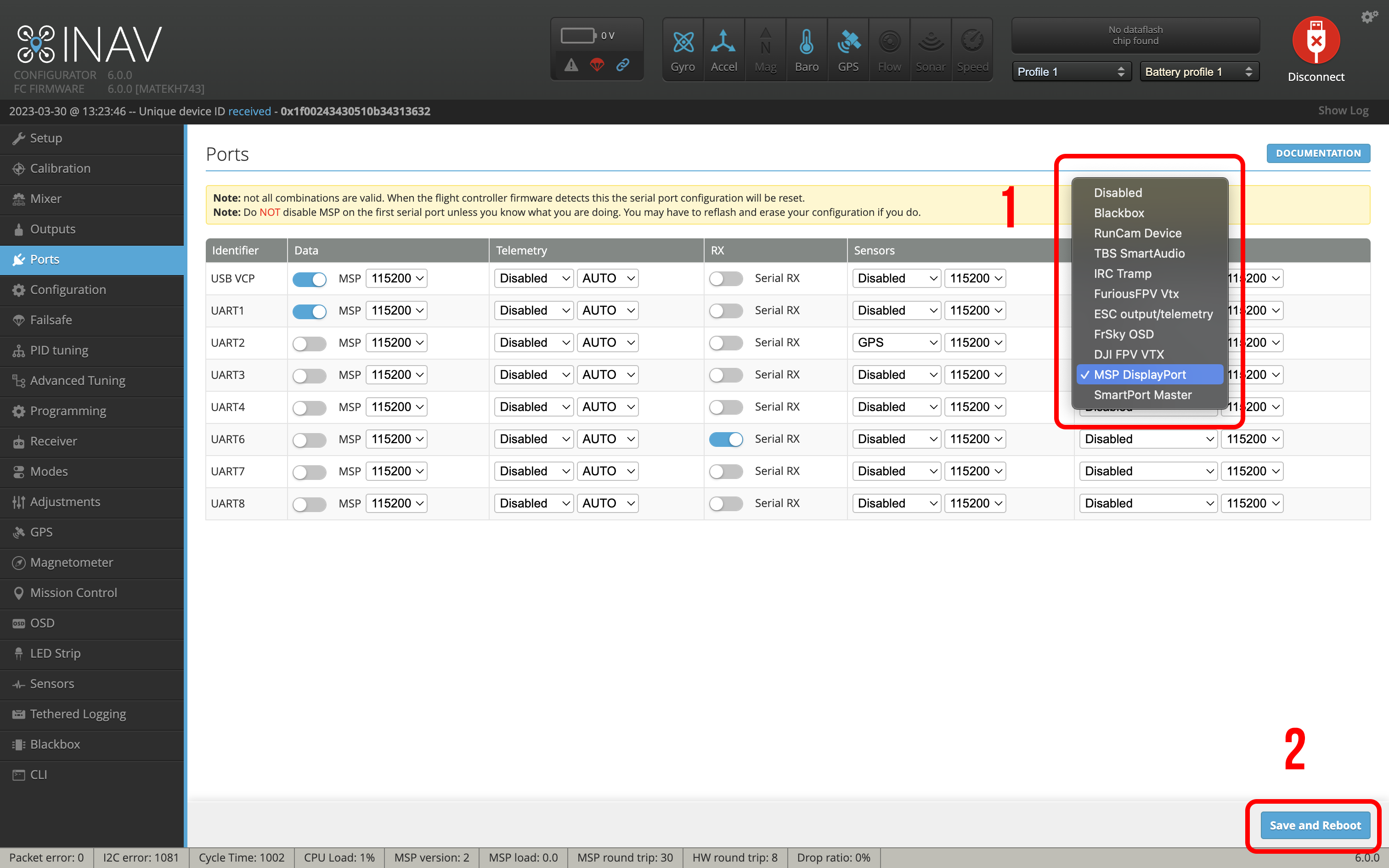
Тут все индивидуально, скажу лишь только то, что для «WTFOS» выбери «MSP DisplayPort». В iNav 6 есть пункт «WFTOS».
Configuration


Sensors & buses – параметры выставятся сами, но если не определился магнетометр(компас), то выстави параметр. «Auto» и подключи аккумулятор. У меня на самолете нет компаса.
Board and Sensor Alignment – если ставил полетник по стрелки, то ничего изменять не надо, а настройку магнетометра делай в соответствующем разделе.
Voltage and Current Sensors – пока не трогал, о нем расскажу отдельно. Сейчас оставил как есть.
Battery Settings – я летаю на сборках 21700 (4000mAh, 3s). Параметры можешь взять мои если летаешь на Li-on батареях. Но если у тебя Li-po, то подправь следующие пункты:
- Maximum cell voltage for cell count detection: 4,2;
- Minimum Cell Voltage: 3,6, можешь 3,5 но я бы не стал;
- Maximum Сell voltage: 4,2;
- Warning Cell Voltage: 3,8.
Other Features – включаем следующие параметры:
- Enable CPU based serial ports – ВЫКЛ;
- Telemetry output – если TBS или ERLS то ВЫКЛ;
- Black box flight data recorder – если надо писать Black Box то оставь;
- Enable motor and servo output – ВКЛ;
- OSD – ВКЛ;
- Permanently enable AIRMODE – ВКЛ;
- Permanently enable Launch Mode for Fixed Wing – ВКЛ.
Failsafe
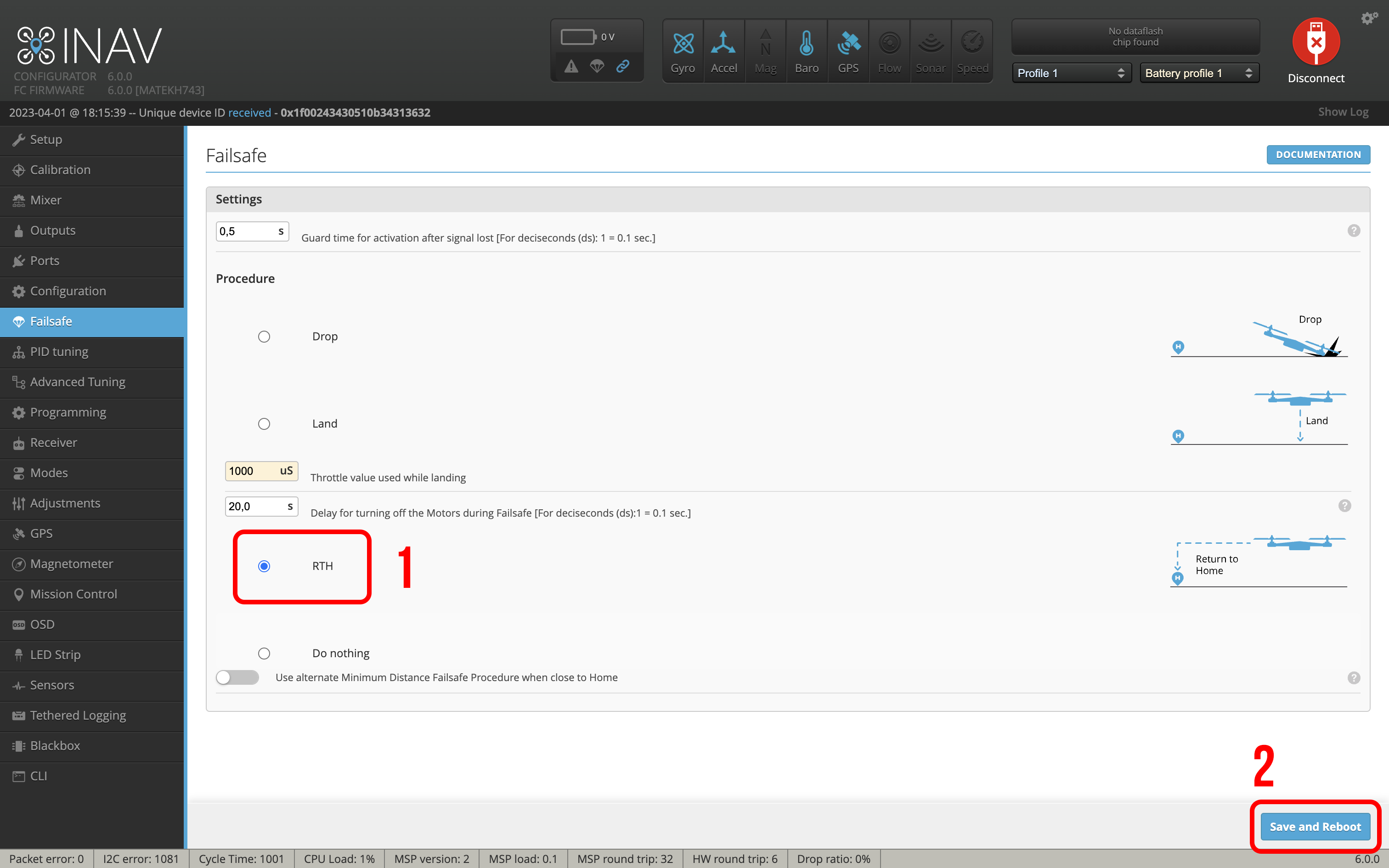
Выбираем «RTH» и больше ничего не трогаем.
PID tuning
Ничего не трогаем, пиды настроем автоматически.
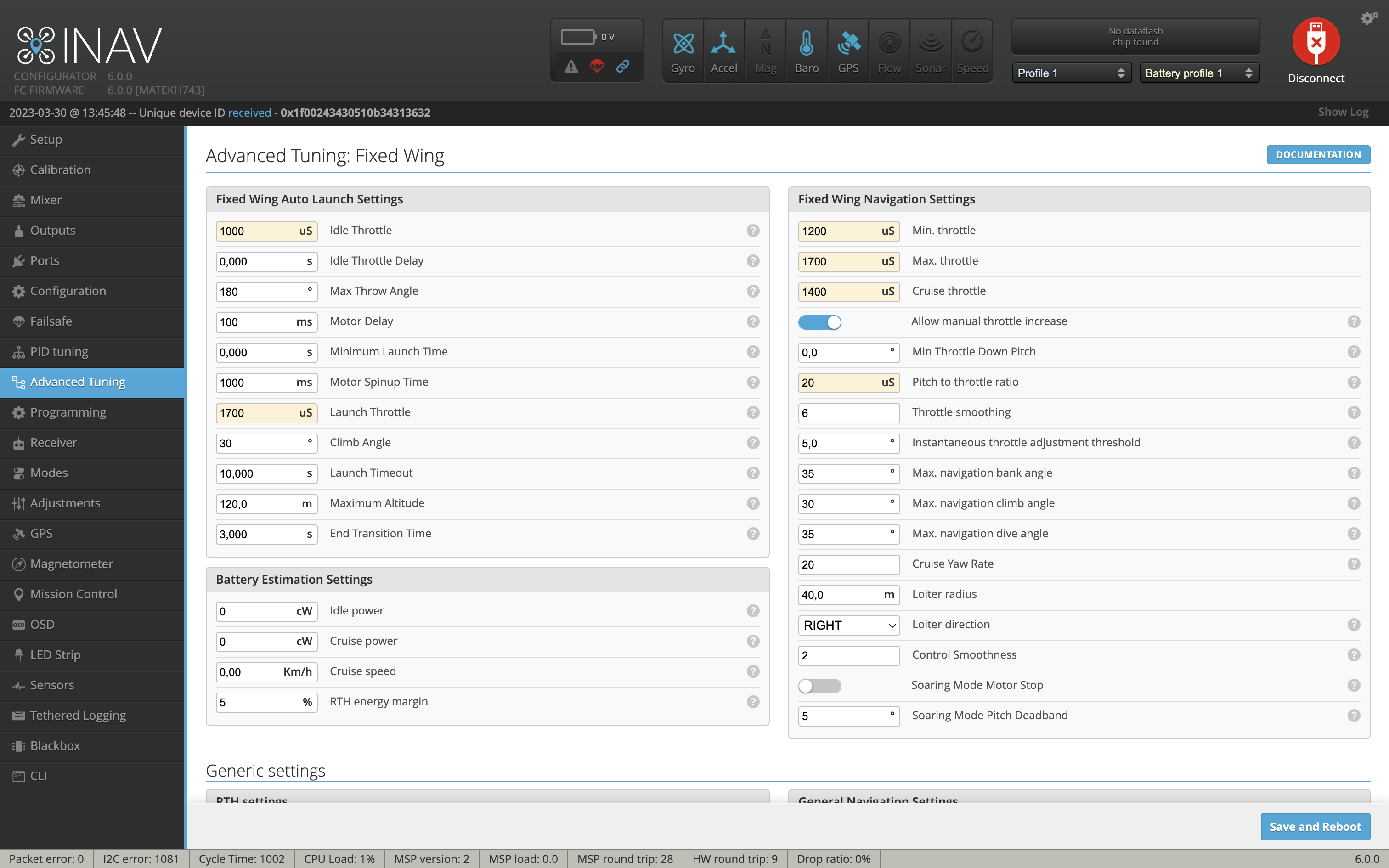
Advanced Tuning

Если у тебя не метры в секунду, а сантиметры то нажми на иконку шестерёнки в правом верхнем углу и выбери «Metric».
Fixed Wing Auto Launch Settings (Авто взлет):
Max Throw Angle (угол броска) – 180;
Motor Delay (пауза в раскрутке мотора) – 100;
Motor Spinup Time (время раскрутки мотора) – 1000;
Launch Throttle (уровень газа при взлете) – 1700 на батах 21700 (4000mAh, 3s) взлетает хорошо, под 4s не пробовал, но думаю тоже буде ок. Тут главное не перестараться. В идеале газ должен быть чуть выше, чем газ в режиме круиза;
Climb Angle (угол набора высоты) – 30, можно меньше, тут сам смотри. Мне 30 самое оно из-за местности взлета.
Launch Timeout (время автовзлета) – 10,000 (10 сек). То есть: самолет будет сам лететь 10 секунд выдерживая направление с набором высоты. Но, если ты пошевелишь стик газа до истечения 10 секунд, то полетник отдаст управление, не дожидаясь окончания 10 секунд;
Maximum Altitude (максимальная высота) – 120, это максимальная высота для увтовзлета, тоесть выше он не полетит;
End Transition Time (время задержки передачи управления) – 2000, можешь оставить по умолчанию 3 секунды.
Fixed Wing Navigation Settings (навигационные режимы)
Те пункты, которые не указал ниже, трогать не надо.
Min. Throttle, Max. Throttle, Cruise throttle – это минимальный, максимальный и газ круиза. Газ круиза надо смотреть в полете после всех настроек. Сейчас оставь как у меня, а в дальнейшем можешь менять этот параметр;
Allow manual throttle increase – ВКЛ, позволит увеличивать газ в навигационных режимах;
Pitch to throttle ratio (добавление газа к набору высоты) – 20;
Throttle smoothing (плавность газа) – 6;
Max. navigation bank angle (макс. угол крена) – 35, можно поменять под себя;
Max. navigation climb angle (макс. угол набора высоты) – 30, можно поменять под себя;
Max. navigation dive angle (макс. угол снижения) – 30, можно поменять под себя;
Cruise Yaw Rate (рысканье) – у нас на Т1 нет рысканья;
Loiter radius (радиус удержания позиции) – 40. Да самолет может удерживать позицию, но не как квад. При удержании позиции самолет летит по кругу, и вот радиус этого круга в метрах указывается тут;
Loiter direction (направление удержания позиции) – «RIGHT», то есть щас вправо, можешь в лево.
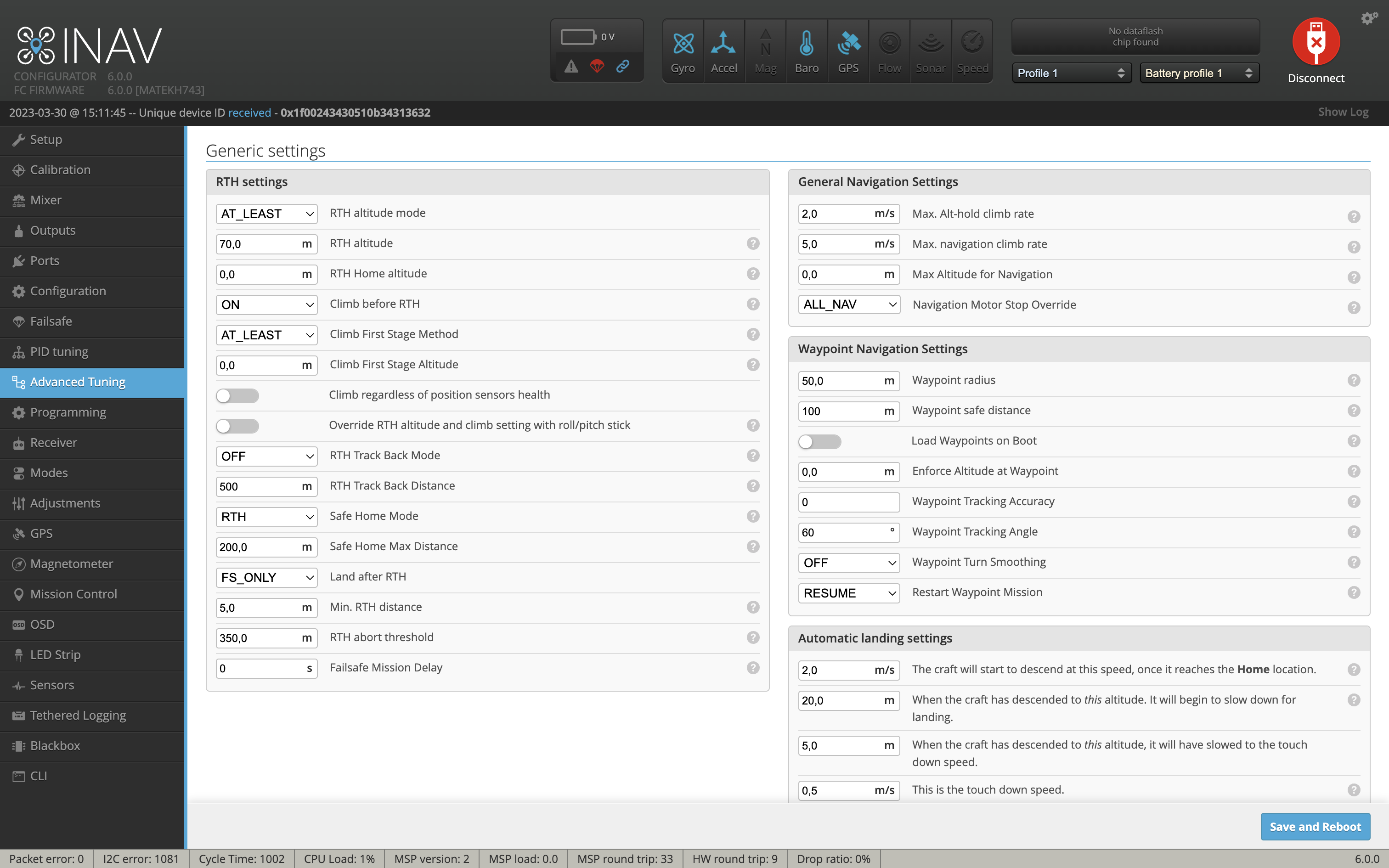
RTH settings (возврат домой)
RTH altitude mode (режим высоты возврата домой): «AT_LEAST» (не ниже высоты указанной «RTH altitude»);
RTH altitude (высота возврата) – 70;
Climb before RTH (подъем на высоты) – «ON», если возврат домой сработал до высоты указанной в «RTH altitude», то самолет начнет возврат домой с набором нужной высоты;
Land after RTH (когда приземляться) – «FS_ONLY», самолет сам приземлиться если сработал «FS»;
Min. RTH distance (мин. дистанция срабатывание возврата домой) – 50.
Все блоки и параметры в них, которые я не описал мы не трогаем. Можешь о них почитать, но на данный момент они тебе не нужны.
Modes

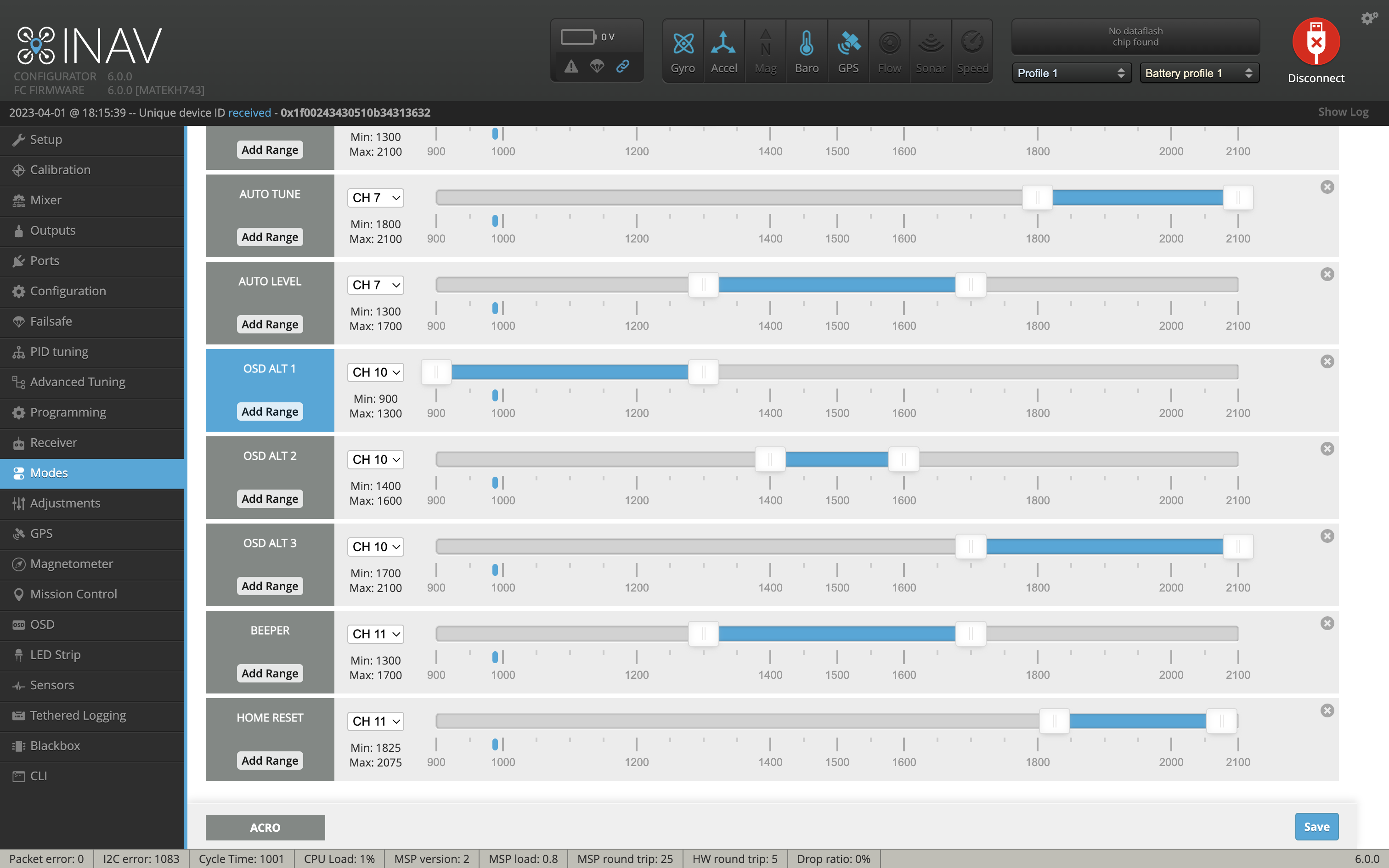
Опишу только те режимы, которые использую. О всех режимах iNav можно прочитать на официальной Wiki странице.
ARM – арминг самолета, преарм не использую в принципе.
ANGLE – режим стабилизации, идеален для набора высоты.
MANUAL – пока не понял в чем его фишка, буду разбираться.
NAV CRUISE – это когда самолет сам летит выдерживая направление и высоту. Включил этот режим, взял что-то попить и сидишь балдеешь. Самолет все делает сам.
NAV LOITER – удержание точки. Тут не как у квада! Самолет накручивает круги над точкой. Диаметр и направление круга можно менять.
NAV RTH – возврат домой.
NAV ALTHOLD – удержание высоты. У меня это вспомогательный режим. Он работает совместно с круизом и удержанием точки.
AUTO TUNE – авто настройка PIDs. Как работает опишу ниже.
AUTO LEVEL – авто трим. Полезная функция, о ней тоже будет ниже.
OSD ALT – выбор экрана OSD. Я использую два: на первом минимум информации чтоб ничего не отвлекало, на втором вся нужная информация, а третий технический для настройки PIDs.
BEEPER – пищалка для поиска.
HOME RESET – сбрасывает дочку дома. Иногда бывает полезно изменить точку дома прям в полете.
GPS
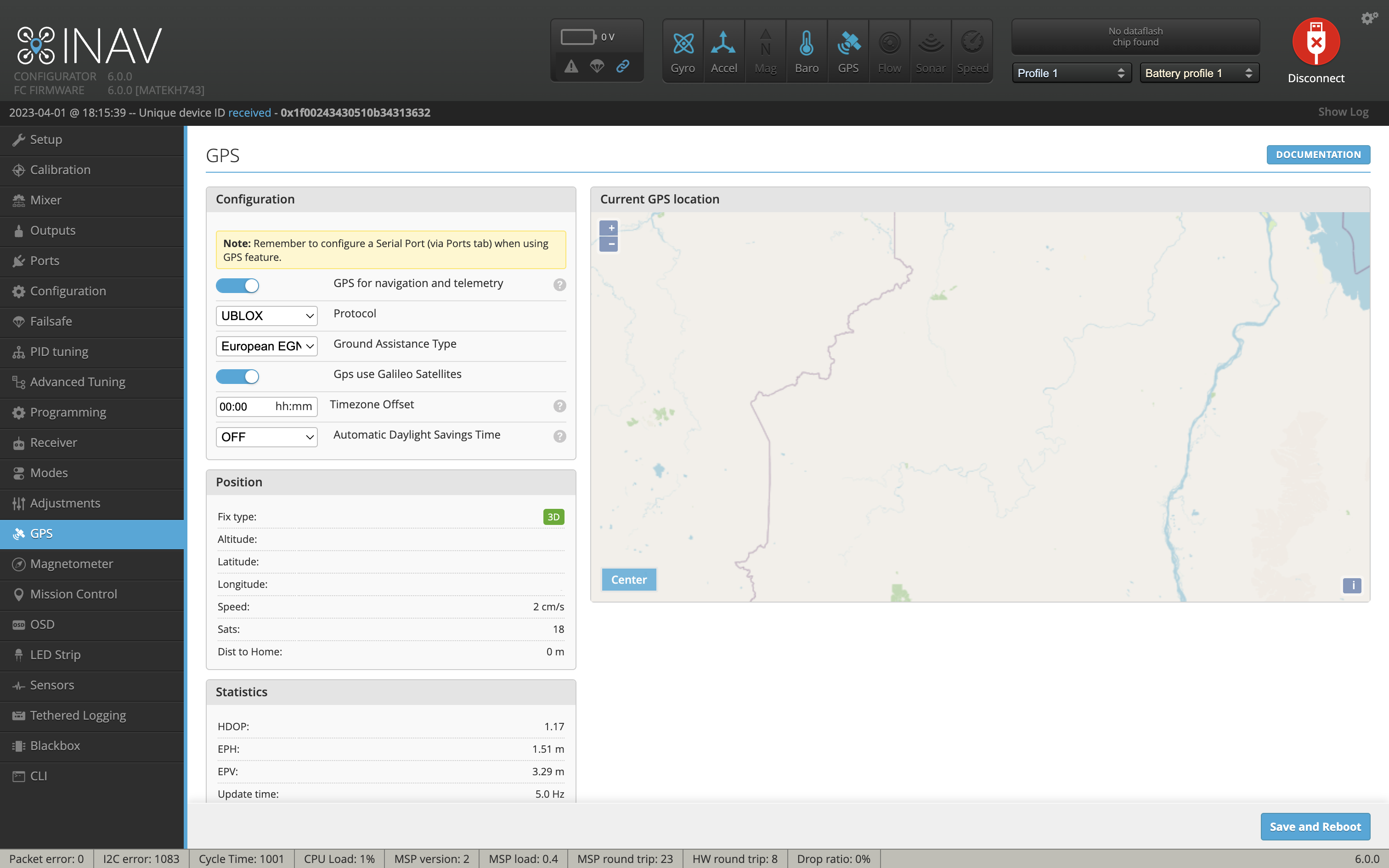
Все настройки на скрине, ставим, сохраняем, забываем.
OSD
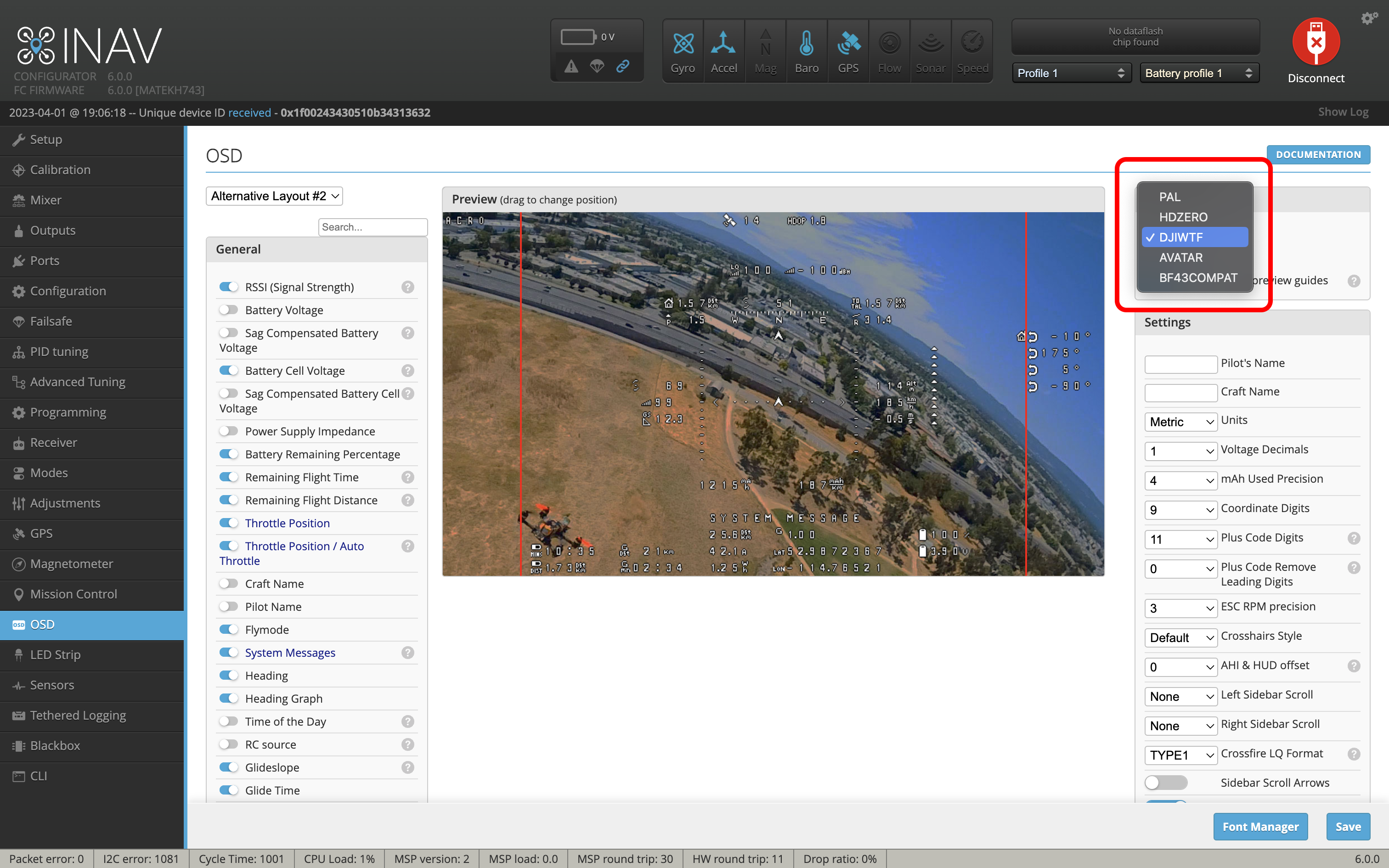
Тут индивидуально, обращу внимание на то, что в iNav 6 появилась полная поддержка WFTOS. Просто выбери ее в правом верхнем углу.
Авто взлет
- Подключаешь бату к самолету. Желательно чтобы самолет лежал на ровной поверхности, так как в момент включения калибруются все датчики;
- Ждем пока найдет спутники;
- После берем самолет в руку, наклоняем его в разные стороны чтобы проверить работоспособность серв;
- Включаем арм и газ выставляем чуть больше половины;
- Резко дергаем самолет – это запустит моторы, и кидаем самолет под углом.
Auto tune (авто настройка PIDs)
В идеале делать при штиле, но это в идеале.
- Набираем законные 100 метров высоты;
- Включаем «ACRO» режим.
- Включаем третий режим OSD, чтобы видеть, что PIDs меняются
- Включаем тумблер «AUTO TUNE»;
- Начинаем делать бочки или раскачиваем самолет влево и вправо, не забывая смотреть за показателями, прекращаем делать бочки, когда показатели перестали меняться;
- Снова набираем высоту 100 метров;
- Начинаем раскачивать самолет вниз и вверх, можно сделать «петлю Нестерова», она же «Мертвая петля». Продолжаем до тех по, пока PIDs не перестанут меняться.
- После тюнинга выключаем режим и летаем.
- После приземления и дизайрма, разводим стики вниз и в стороны чтобы сохранить настройки.
Auto level (авто трим)
Так же в идеале делать при штиле. Но в целом пофиг.
- Набираем законные 100 метров;
- Включаем режим «MANUAL» и режим «AUTO LEVEL», удерживаем самолет ровно 2 секунды;
После чего самолет должен лететь ровно не набираю высоты. После приземления сохраняем настройки.

На этом все. Чистого неба! Увидимся!!!
 Новые посты в моем Телеграмм канале
Новые посты в моем Телеграмм канале